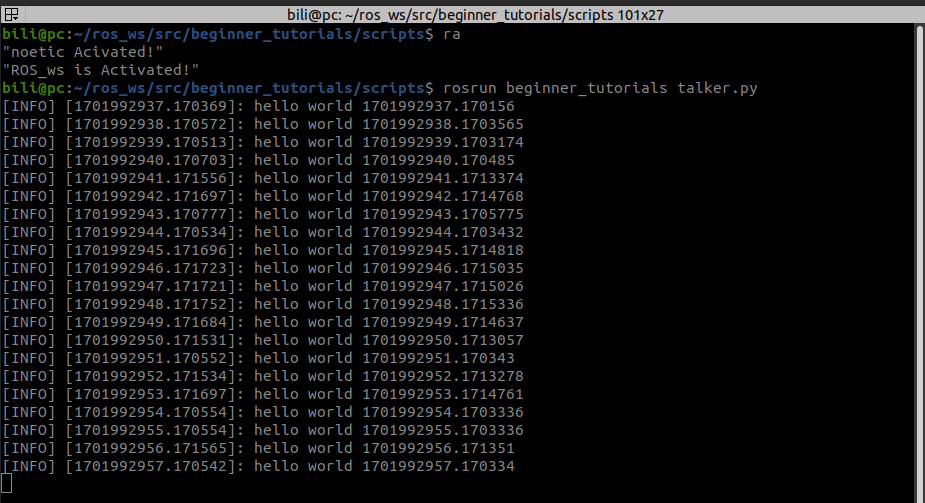
시작단계: $ roscd beginner_tutorials $ mkdir scripts $ cd scripts 1. Publisher Node 작성하기 1) scripts 폴더내에 python 파일 작성 #!/usr/bin/env python3 # license removed for brevity import rospy from std_msgs.msg import String def talker(): pub = rospy.Publisher('chatter', String, queue_size=10) rospy.init_node('talker', anonymous=True) rate = rospy.Rate(10) # 10hz while not rospy.is_shutdown(): hello_str = "h..