시작단계:
$ roscd beginner_tutorials
$ mkdir scripts
$ cd scripts
1. Publisher Node 작성하기
1) scripts 폴더내에 python 파일 작성
#!/usr/bin/env python3
# license removed for brevity
import rospy
from std_msgs.msg import String
def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep()
if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass*파이썬 버전에 따라 첫 번째 줄 수정
2) CMakeLists.txt 수정
catkin_install_python(PROGRAMS scripts/talker.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
2. Subscriber Node 작성하기
1) scripts 폴더내에 python 파일 작성
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
def listener():
# In ROS, nodes are uniquely named. If two nodes with the same
# name are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
listener()
2) CMakeList.txt 수정
catkin_install_python(PROGRAMS scripts/talker.py scripts/listener.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
모두 끝나면 마지막에 catkin workspace에서 catkin_make 하는거 잊지않기~.~
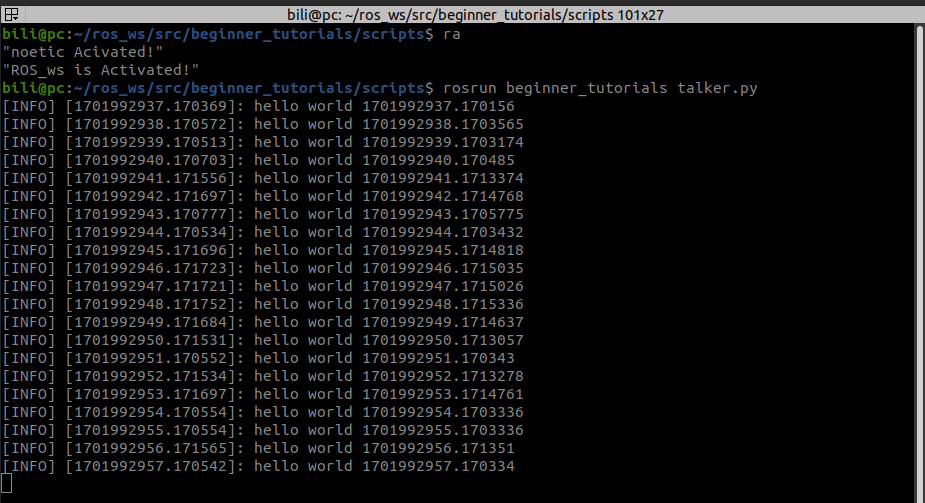
결과:
rosrun <pkg_name> <node_name>
rosrun beginner_tutorials talker.py
rosrun beginner_tutorials listener.py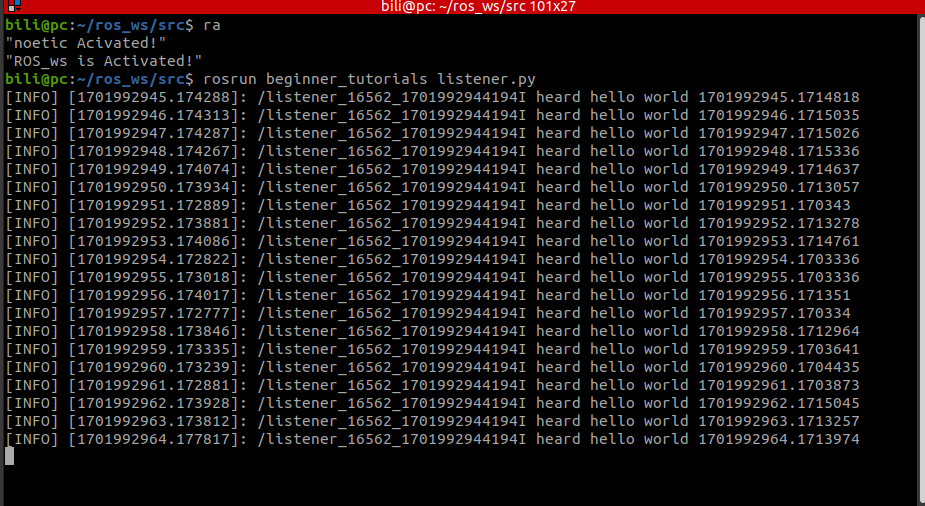
'ROS' 카테고리의 다른 글
| ROS_Study: Recording and playing back data (1) | 2023.12.08 |
|---|---|
| ROS_Study: Creating a ROS msg and srv(Only srv) (1) | 2023.11.22 |
| ROS_Study: Creatomg a ROS msg and srv(Only msg) (0) | 2023.11.22 |
| ROS_Study: Understanding ROS Services and Parameters (0) | 2023.11.22 |
| ROS_Study: Understanding ROS Topics (0) | 2023.11.22 |